

-
 LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00
LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00 -
 定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00
定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00 -
 供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00
供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00 -
 预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥1.00万
预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥1.00万 -
 定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00
定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00
- 产品参数
- 图文介绍
- 企业简介
- 企业地址
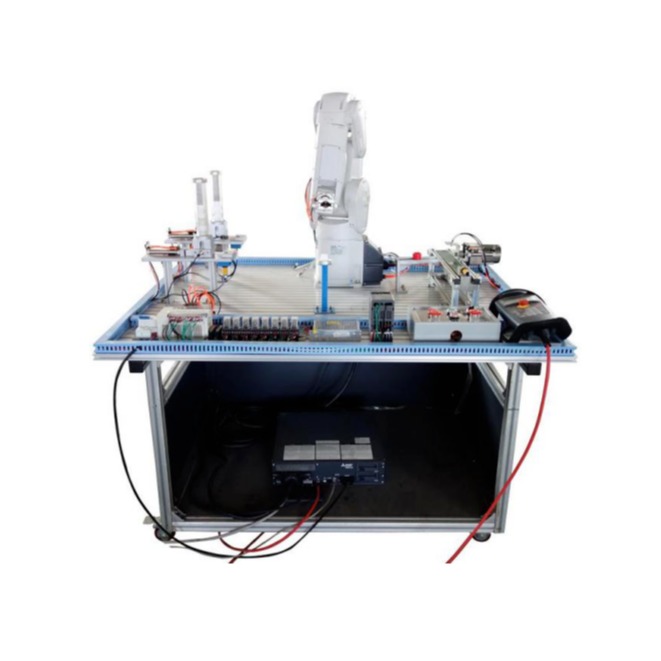
LG-JQR六轴协作机械臂机器人开发实训设备
机械臂
自由度 | 6 | |
工作半径 | 625mm | |
负载 | 3Kg | |
重量 | 16 Kg | |
协同操作 | 根据ISO 10218-1:2011进行协同操作,具备“安全适用的受监控停止”、“拖动示教”以及“功率与力限制”等协作机器人安全功能。 | |
定位精度 | ± 0.1 mm | |
末端速度 | <=1.9 m/s | |
平均功率 | 150W | |
材料 | 铝合金 | |
环境湿度 | 25-90%(无冷凝) | |
环境温度 | 0-50℃ | |
防护等级 | IP54 | |
供电电源 | DC 48V | |
安装方式 | 任意角度 | |
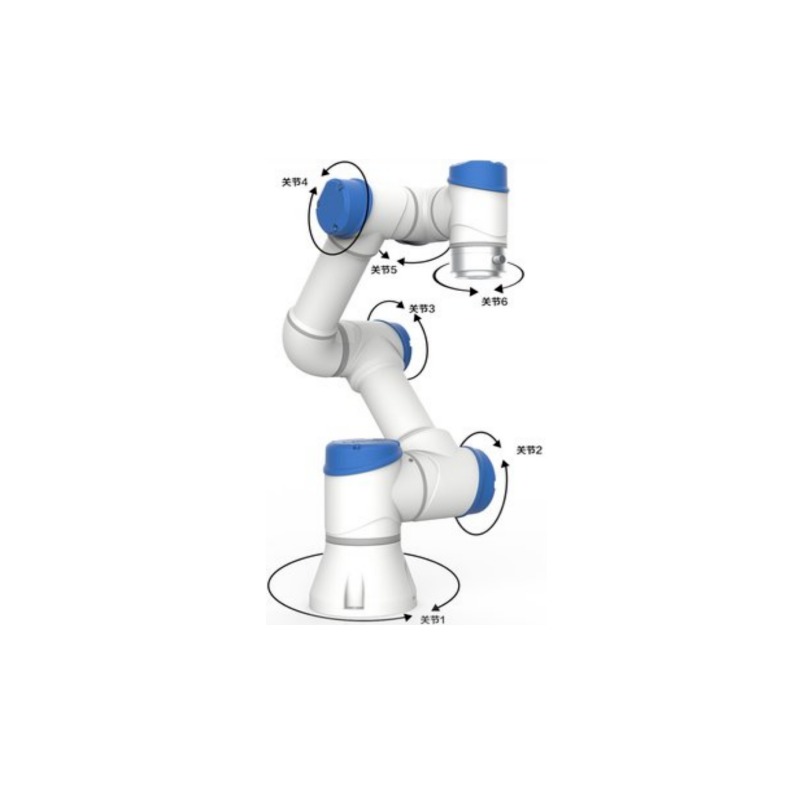
运动轴 | 运动范围 | 速度 |
关节1基座: | ±175º | 180º/s |
关节2肩部: | ±175º | 180º/s |
关节3肘部: | ±175º | 180º/s |
关节4腕部: | ±175º | 180º/s |
关节5腕部: | ±175º | 180º/s |
关节6腕部: | ±175º | 180º/s |
机械臂I/O接口
电源输出 | 电流输出 | 数字量I/O | 模拟量输入 |
12V/24V | 0.8A Max | 4路Max(输入、输出可配) | 2路 |
控制柜
尺寸 | 380mm*350mm*265mm | |
重量 | 15Kg | |
连接线长度 | 5m(可定制, 长8m) | |
颜色 | 黑色 | |
通讯协议 | Ethemet. Modbus-RT. Profinet(选配) | |
接口与开放性 | SDK (支持C\C+\Lua\Python开发)、支持ROS系统、API | |
供电电源 | 100-240VAC,50-60 Hz | |
防护等级 | IP43 | |
控制柜I/O接口 | 普通I/O | 安全I/O |
数字量输入 | 16 | 16 |
数字量输出 | 16 | 16 |
模拟量输入 | 4 | - |
模拟量输出 | 4 | - |
输出电压 | 24V | |
输出电流 | 3A Max | |
示教器
尺寸 | 355x235x54mm |
重量 | 1.57Kg |
显示器 | 12寸电阻式液晶触控屏 |
连接线长度 | 4m |
防护等级 | IP43 |
颜色 | 蓝色+白色 |


注: 1.双点划线表示:区域界线
2双点划线包容的空间区域为机械臂正装,吊装和垂直安装建议机械臂佳工作时工具端轨迹的区域3.机械臂工具端运动极限轨迹可能超出双点划线包容的空间区域
4双点划线包容的空间区域为一个缺陷的球面的内表面包含的空间区域和一个柱面外表面的空间区域的交集

LG-JQR六轴协作机械臂机器人开发实训设备3kg负载,体积小、自重轻,是针对新零售、服务等C端场景的全新系列产品,能够实现快速适安装、灵活部署,可与视觉、末端抓取、AGV(AMR)等众多外的围设备集成使用。可与人或其他自动化设备共同协作。

-

-

-

-

-

-

-
 微机继电保护装置、微机继电保护设备、微机继电保护系统¥9800.00
微机继电保护装置、微机继电保护设备、微机继电保护系统¥9800.00 -






- 产品参数
- 图文介绍
- 企业简介
- 企业地址